
- Mechanik - Antriebstechnik
- Antriebstechnik, Motorsteuerung
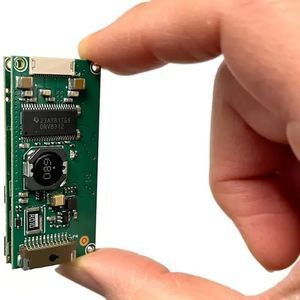
- Dreiphasiger Servoregler
- SMAC Moving Coil Actuators
3-Phasen-Servoregler VLC-ETCbürstenlosbürstenbehaftetEtherCAT

Zu meinen Favoriten hinzufügen
Zum Produktvergleich hinzufügen
Eigenschaften
- AC/DC
- 3-Phasen
- Motor
- bürstenlos, bürstenbehaftet
- Ausgangssignal
- EtherCAT
- Weitere Eigenschaften
- eingebaut
Beschreibung
Der VLC-ETC ist ein EtherCAT-Servoantrieb, der auf dem integrierten 1-Achsen-Controller/Treiber VLC von SMAC und einer zusätzlichen Schicht basiert, die die EtherCAT-Konnektivität bereitstellt. Der VLC-Teil ist mit Systemmakros vorprogrammiert, um die Steuerungs- und Überwachungsfunktionalitäten des Servoantriebs zu unterstützen.
Zusätzliche Makros können im VLC programmiert werden, um Unterroutinen/Funktionen auszuführen, die vom EtherCAT-Master aufgerufen werden können. Für die Konfiguration der Servoparameter des VLC-ETC ist Hintergrundwissen über den VLC erforderlich. Weitere Informationen zu den Servoantriebs-Parametern und zur Programmierung finden Sie im aktuellen VLCI-R1 oder VLCI-X1 Handbuch.
---
Kataloge
Für dieses Produkt ist kein Katalog verfügbar.
Alle Kataloge von SMAC Moving Coil Actuators anzeigenWeitere Produkte von SMAC Moving Coil Actuators
Electric Cylinders







Verwandte Suchbegriffe
- Elektromotor
- Gleichstrommotor
- Synchronmotor
- Mehrpoliger Motor
- BLDC-Motor
- Servoverstärker
- 6-poliger Motor
- Motor-Controller
- Hochdrehmoment Motor
- Motor / 48 V
- Feldbus-Servoregler
- Motor-Controller / DC
- Motor-Controller / Schritt
- Bürstenloser Servoverstärker
- Linearer Servomotor
- Bürstenbehafteter Servoregler
- EtherCAT-Servoverstärker
- BLDC-Motorcontroller
- Kompakter Motor-Controller
- Motor-Controller / CANopen
* Die Preise verstehen sich ohne MwSt., Versandkosten und Zollgebühren. Eventuelle Zusatzkosten für Installation oder Inbetriebnahme sind nicht enthalten. Es handelt sich um unverbindliche Preisangaben, die je nach Land, Kurs der Rohstoffe und Wechselkurs schwanken können.