Parallel-Manipulator ist anwendbar auf Lebensmittel, Medizin, Gewürze, Kunststoffe, Kunsthandwerk, Elektronik und verschiedene Arten von Materialien Sortieren und Transportieren von anderen Branchen.
- Es kann angedockt werden Front-End-Kontrollwaage, Metalldetektor, Röntgendetektor und andere Verpackung Produktionslinie Automatisierung Anwendung Ausrüstung, starke Vielseitigkeit, breiten Anwendungsbereich, hohe Präzision und starke Stabilität
- Es kann eine schnelle Sortierfähigkeit und ein optionales visuelles Anwendungssystem realisieren, was die Positionierung genauer und einfacher zu greifen macht.
- Touchscreen Mensch-Maschine-Schnittstelle, Multi-Koordinaten-Form Debugging, Jog-Steuerung, Parameter-Einstellung, etc., die Unterstützung der Lehr-Modus, komplette lineare, Bogen und Raum Trajektorie Bewegung.
- Lehre und Debugging mit Lehr-Gerät, leicht zu erlernen Programmierung, reiche Befehlssatz, kann eine breite Palette von Anwendungsanforderungen zu erfüllen, können die Nutzer durchführen sekundären Entwicklung.
- Unterstützung Multi-Station Termine.
- Überlastschutzfunktion mit automatischer Abschaltung.
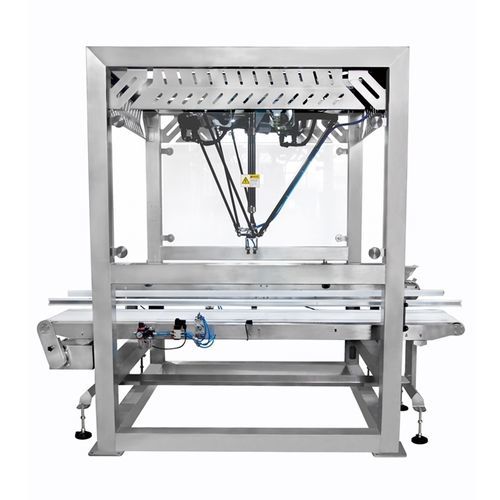
- Unabhängige Hauptbasis mit Sprühen, einfaches und schönes Aussehen, einfach zu installieren und zu warten.
- Der rotierende Hauptarm ist aus Kohlefaser gefertigt, die leichter in der Struktur und stabiler in der Leistung ist.
- 4-Achsen-Gestänge-Struktur, die das Material ergreifen und in die angegebene Richtung drehen kann.
- Verwenden Sie Servo-Kontrollsystem, um die Genauigkeit der Arbeit Anwendung zu gewährleisten.
- Optionale visuelle oder teleskopische und Full-Line-verbundene Anwendungen, Unterstützung für kundenspezifische Anwendungen in der Förderstrecke, flexible Konfiguration.
- Optional Körper äußeren Rahmen Material nach der Anwendung Umwelt, Edelstahl / Kohlenstoffstahl sind optional.
---