
- Umwelt - Gesundheit - Sicherheit
- Gebäudesicherheit, Maschinensicherheit
- ATI Industrial Automation
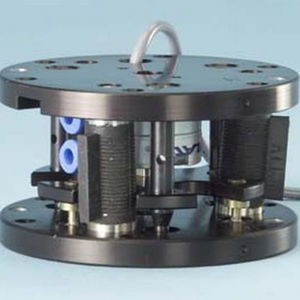
Kompakter Compliance-Einheit / Kollisionssensor für Roboter L1X-125-HDrehmaßgefertigt

Zu meinen Favoriten hinzufügen
Zum Produktvergleich hinzufügen
Eigenschaften
- Weitere Eigenschaften
- kompakt, Dreh, maßgefertigt
Beschreibung
-Einzigartige Nachgiebigkeit: Der zum Patent angemeldete Mechanismus ermöglicht eine seitliche X-Y-Nachgiebigkeit und eine rotatorische Z-Nachgiebigkeit.
-Direkte Montage: Das ISO-Roboterflanschmuster ermöglicht die direkte Montage an vielen Standard-Roboterhandgelenken in einem kompakten Gehäuse.
-Flexible Konfigurationen: Viele Optionen verfügbar, wie z. B. PNP- oder NPN-Abtastung für verriegelte (zentrierte) und unverriegelte (schwebende) Bedingungen, verschiedene Nabengrößen und kundenspezifische Werkzeugplattenmuster.
-Option zum Halten der Position: Ein zusätzlicher Kolbensatz kann mit Luftdruck beaufschlagt werden, um die Einheit im versetzten Zustand zu halten.
Seitliche Nachgiebigkeit - ±0,175 Zoll
Rotationsnachgiebigkeit - ±18°
Neuzentrierung, maximale vertikale Nutzlast - 220 lb
Re-Center, Max Horizontale Nutzlast - 100 lb Versatz 6 in
Re-Center, maximales Moment (X-Y) - 480 lbf-in
Rückzentrierung, Max. Moment (Z) - 80 lbf-in
Verriegelte Steifigkeit bei maximalem statischen Moment (X-Y) - ±0,2° bei ±6900 lbf-in
Verriegelte Steifigkeit bei maximalem statischen Moment (Z) - ±0,4° bei ±540 lbf-in
Position halten, maximale Seitenkraft * - 80 lbf
Position halten, maximales Moment Z - 130 lbf-in
Gewicht - 13 lb
Nennbetriebsdruck - 80 psi
Positionswiederholgenauigkeit an der Werkzeugschnittstelle - ±0,0015 in
Umgebungstemperaturbereich - -20 °F - 150 °F
Nennlebensdauer - 1 Million Zyklen
Abtastoption - Verriegeln und Entriegeln
---
Kataloge
Für dieses Produkt ist kein Katalog verfügbar.
Alle Kataloge von ATI Industrial Automation anzeigenWeitere Produkte von ATI Industrial Automation
Compliance devices

















* Die Preise verstehen sich ohne MwSt., Versandkosten und Zollgebühren. Eventuelle Zusatzkosten für Installation oder Inbetriebnahme sind nicht enthalten. Es handelt sich um unverbindliche Preisangaben, die je nach Land, Kurs der Rohstoffe und Wechselkurs schwanken können.